

高専ロボコン2018 Aチーム製作ロボット
近畿地区大会 デザイン賞受賞、全国大会出場(審査員推薦)
2018年の第31回大会「Bottle-Flip Cafe」に出場しました。
アイデアコンセプト
「明明明明」は、
- 達成が難しいVゴールを最速で決めて、全国優勝する
- 会場の観客も盛り上がるようなアイデアのロボットを作る
という2つの目標を立てて活動を進めてきました。
Vゴールをするためには、確実にペットボトルを立てられる正確さや素早い動作が求められる一方で、観客を魅了するには、ほかのチームにない唯一無二の機構やデザインが必要です。
そこで、無駄のない動きとペットボトルの素早い射出が可能な自動ロボットと、ペットボトルを包んで飛ばすことで「フリップ(回転)」ができ、外装にもこだわった手動ロボットを製作しました。
ロボット紹介
自動機「ごろー」

2段テーブルの下段・上段と3つの移動テーブルにペットボトルを立てるロボットです。PCを搭載しており、
機構
足回りは、地区大会用では4輪のメカナムホイールを使用していましたが、全国大会では駆動用・計測用ともに3輪オムニホイールを使用しており、足回り全体の形は六角形となっています。
ペットボトルの射出は、エアシリンダの伸縮と動滑車を利用して行います。エアシリンダを動作させると、ペットボトルを載せた台座が高速で持ち上がり、直線状にペットボトルが射出されます。テーブルに応じて飛距離を調整しており、1.2m用が2本、1.5m、1.8m、2.4m用がそれぞれ1本の計5本の機構を搭載しています。
中央の2.4m用の機構には、装填機構も併せて製作しました。ペットボトルを斜めに傾けた状態で積み上げるように装填しておき、モータとラック・ピニオンを用いて下から持ち上げると、上のボトルから順に斜面を滑って発射機構に装填される仕組みになっています。フォトセンサでスリットを読むことで上下する部分の位置を制御しています。
制御
計測輪に取り付けたロータリーエンコーダで測定した回転数から、ロボットの大まかな位置を把握して目標地点まで移動します。機体に取り付けられたLRFや超音波センサにより距離を測定することで詳細な位置を求め、位置の微調整を行っています。
移動テーブルは、試合ごとに位置が変わってしまうので、スライドボリュームを用いて製作した移動テーブルの模型基板を操作することで位置を把握しています。
手動機「まみー」
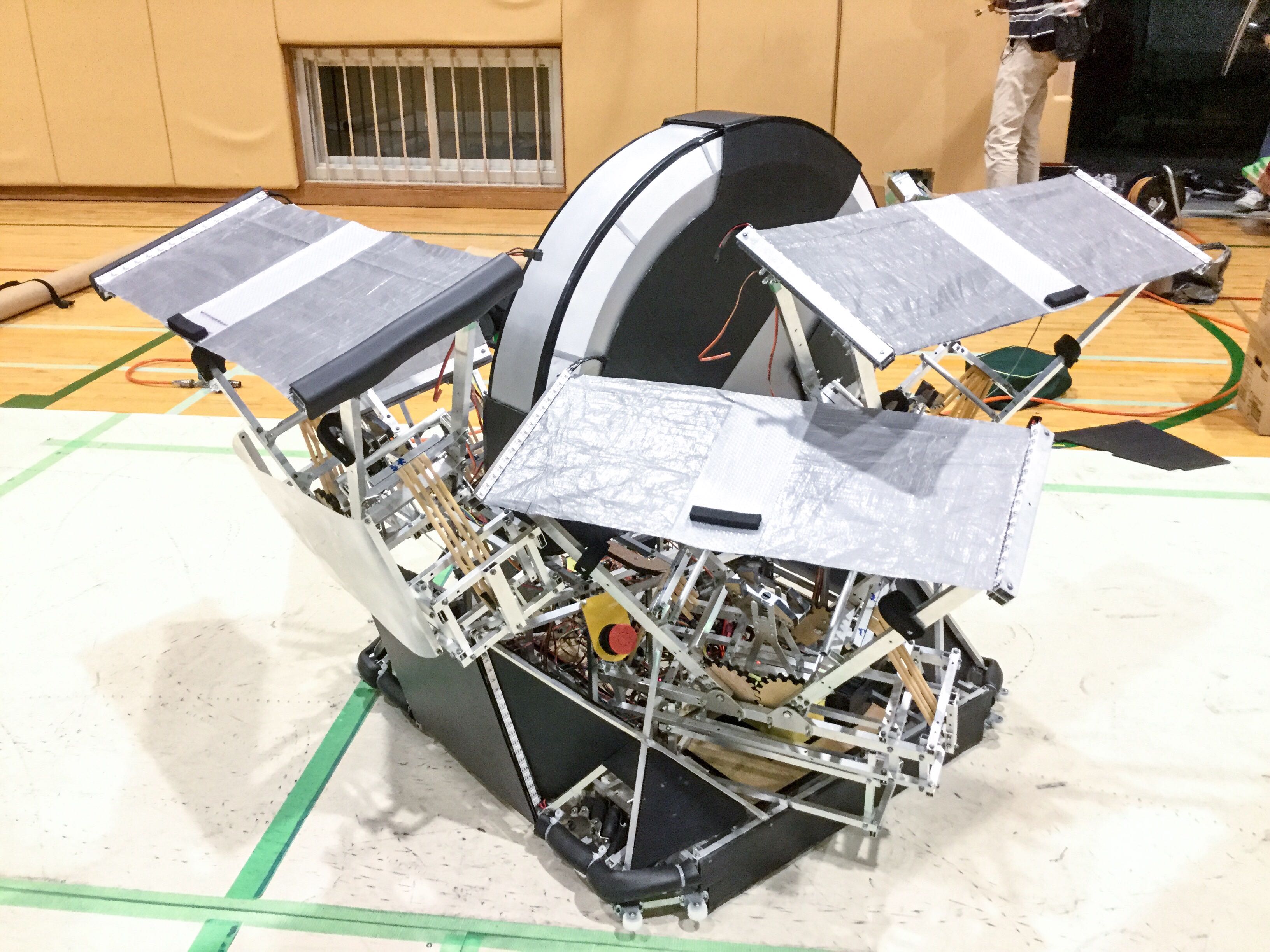
主に3つの固定テーブルにペットボトルを立てるロボットです。
かたつむりの殻を模した大きな外装と、明るく輝き機体を彩るLEDが特徴です。
機構
2本のフレームの間にビニールシートを張っており、フレームはゴムで外向きに強く引っ張っています。人の手によりシートにペットボトルを装填して閉じたあと、ロックを解除すると勢いよく開き、ペットボトルを射出します(この方式を「包んでポン」と呼んでいます)。
「包んでポン」は5つ搭載しています。中央の固定テーブルの正面で、前方の3つを動作させることで、全ての固定テーブルに同時にペットボトルを立てることができます。側面の2つは飛距離が長くなるように調整しており、2段テーブルの下段も狙うことができます。
戦績
近畿地区大会
予選リーグ① 明石A 15-2 奈良B「Pawn」
予選リーグ② 明石A 4-0 近大A「K.afe」
決勝トーナメント準決勝 明石A 3-23 神戸A「VICT(OO)N」
全国大会
1回戦 明石 3-3 鈴鹿「ノーチラス」
(審査員判定 1-4)